A three phase induction motor is one of the most widely used electrical machines in industrial and domestic applications due to its simple construction, ruggedness, low cost, and high reliability. It converts three phase electrical energy into mechanical energy through the principle of electromagnetic induction. The machine was Invented by Nikola Tesla in 1887.

Table of Contents
Working Principle
The three-phase induction motor operates on the principle of electromagnetic induction. When three-phase alternating current flows through the stator windings, it creates a rotating magnetic field. This field rotates at synchronous speed, determined by the formula:
Ns = 120f / P
Where Ns is synchronous speed in RPM, f is the supply frequency in Hz, and P is the number of poles.
The rotating magnetic field cuts through the rotor conductors, inducing currents in them according to Faraday’s law of electromagnetic induction. These induced currents create their own magnetic field, which interacts with the stator’s rotating field. The interaction produces a torque that causes the rotor to rotate in the same direction as the magnetic field, though at a slightly slower speed.
The Concept of Slip
The rotor never quite catches up to the synchronous speed of the rotating magnetic field. This difference is called slip, typically ranging from 2% to 5% at full load in standard motors. Slip is essential for motor operation because without it, no relative motion would exist between the rotor and magnetic field, meaning no current would be induced and no torque would be produced.
Slip (s) = (Ns – Nr) / Ns × 100%
Where Nr is the actual rotor speed.
Construction
A three-phase induction motor consists of two main components: the stator and the rotor.
The stator forms the stationary outer frame, housing three sets of windings arranged 120 degrees apart. These windings are connected either in star or delta configuration, depending on the application requirements. The stator core is made of laminated silicon steel to reduce eddy current losses.
The rotor, mounted on a shaft supported by bearings, comes in two main types. The squirrel cage rotor features aluminum or copper bars short-circuited by end rings, resembling a cage. This design is rugged, maintenance-free, and used in about 90% of all induction motors. The wound rotor, alternatively, has three-phase windings similar to the stator, with connections brought out through slip rings. This allows external resistance to be added for improved starting torque and speed control.
Rotating Magnetic Field
When a three-phase supply is connected to the stator windings, it produces a Rotating Magnetic Field that continuously rotates around the stator.
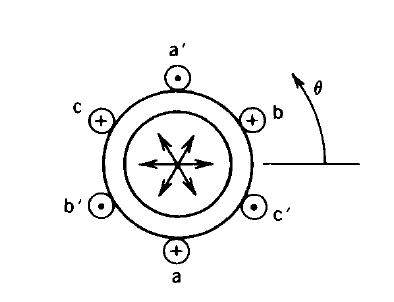
The stator consists of three separate windings (Phases A, B, and C) that are physically spaced 120° apart along the inner circumference of the stator. When connected to a three-phase AC supply, the currents flowing through these windings are also 120° out of phase with each other in time. This means that when Phase A is at its peak, Phases B and C are at different points in their respective cycles.
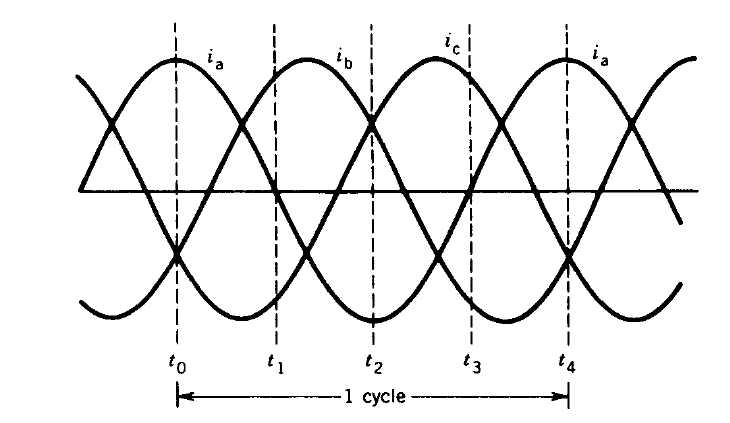
Each winding produces its own time-varying magnetic field. Since the currents are continuously changing, the individual magnetic fields also vary. However, by applying vector addition to these three fields at any instant, the resultant magnetic field exhibits two important properties:
Constant Magnitude:
The magnitude of the resultant magnetic field remains constant and is equal to \(1.5 \, \Phi_m\), where \(\Phi_m\) is the maximum flux produced by a single phase.
Continuous Rotation:
The direction of the resultant magnetic field continuously changes with time. During one complete cycle of the AC supply, the magnetic field completes one full revolution around the stator.
Why Rotating Magnetic Field matters?
This rotating magnetic field is responsible for the operation of an induction motor. As the RMF sweeps past the rotor conductors, it induces an electromotive force according to Faraday’s Law. This induced EMF generates current in the rotor, which in turn produces its own magnetic field. The interaction between the stator and rotor magnetic fields produces torque, causing the rotor to rotate.
What is Slip?
Slip in an induction motor is the difference between the speed of the rotating magnetic field (synchronous speed) and the actual speed of the rotor. It is a crucial concept because torque is produced only due to slip; without slip, the motor cannot operate.
The mathematical expression for slip is:
$$ s = \frac{N_s – N_r}{N_s} $$
where:
- $N_s$ = Synchronous speed (RPM)
- $N_r$ = Rotor speed (RPM)
- $s$ = Slip
The stator produces a magnetic field rotating at synchronous speed, and the rotor tries to follow it. However, the rotor always lags behind slightly. This lag is called slip.
In simple terms:
- The rotor is continuously trying to catch up with the rotating field
- But it always stays slightly behind, which keeps the motor running
Slip is a small but essential difference in speed that enables electromagnetic induction and torque production in an induction motor.
Q. A 6-pole, 50-Hz, 3-φ induction motor has a full load speed of 950 rpm. At half-load, its speed would be ……rpm.
(a) 475
(b) 500
(c) 975
(d) 1000
Ans: (c) 975.
Solution:
Synchronous Speed (\(N_s\))
\[N_s = \frac{120 \times f}{P}\]
Given \(f = 50 \text{ Hz}\) and \(P = 6\):
\[N_s = \frac{120 \times 50}{6} = 1000 \text{ rpm}\]
Full-Load Slip (\(s_{fl}\))
\[s_{fl} = \frac{N_s – N_{fl}}{N_s} = \frac{1000 – 950}{1000} = 0.05\]
Half-Load Slip (\(s_{hl}\))
Slip is approximately proportional to the load in the stable operating region:
\[s_{hl} \approx \frac{s_{fl}}{2} = \frac{0.05}{2} = 0.025\]
Half-Load Speed (\(N_{hl}\))
\[N_{hl} = N_s(1 – s_{hl})\]
\[N_{hl} = 1000(1 – 0.025) = 975 \text{ rpm}\]
Types and Applications
Induction motors are classified by their rotor construction and operational characteristics. Squirrel cage motors dominate industrial applications due to their simplicity and reliability. They power pumps, fans, compressors, conveyors, and machine tools. The wound rotor motor, though less common, finds use in applications requiring high starting torque or controlled acceleration, such as cranes, hoists, and large fans.
Based on design, motors are further categorized into classes with different torque-speed characteristics. Class A motors offer normal starting torque with low slip, suitable for general-purpose applications. Class B motors provide moderate starting torque and are the most common type for pumps and fans. Class C motors deliver high starting torque for heavy loads like compressors and crushers. Class D motors produce very high starting torque with high slip, ideal for punch presses and shears.
Advantages
The widespread adoption of three-phase induction motors stems from several compelling advantages. Their construction is simple and rugged, with no brushes or commutators requiring replacement. They are highly reliable, often running for decades with minimal maintenance beyond bearing lubrication. The motors are relatively inexpensive to manufacture and operate efficiently across a wide load range. They provide smooth operation with minimal vibration and can be designed for various speeds by changing the number of poles. Their self-starting capability eliminates the need for external starting mechanisms in most applications.
Starting Methods
Despite their advantages, large induction motors draw significant current during startup, often five to seven times the full-load current. This can cause voltage drops in the supply system and mechanical stress. Several starting methods address this issue.
Direct-on-line starting, the simplest method, connects the motor directly to the supply. It’s suitable only for smaller motors where the high starting current doesn’t cause problems. Star-delta starting initially connects the windings in star configuration during startup, reducing the voltage per winding to 58% of normal, then switches to delta for normal operation. This reduces starting current to about one-third of direct-on-line values.
Auto-transformer starters use a transformer to reduce the applied voltage during starting, while soft starters employ electronic devices to gradually increase voltage. Variable frequency drives represent the most sophisticated approach, controlling both voltage and frequency to provide smooth acceleration and precise speed control.
- TS Curve of Induction Motor
- How to Start a Three Phase Induction Motor?
- Load GD2 and Torque Speed Curve
Speed Control
Traditional induction motors run at nearly constant speed, but modern applications often demand variable speed operation. Frequency control through variable frequency drives has become the dominant method, varying both frequency and voltage to maintain optimal flux levels while changing speed. This approach offers excellent efficiency and precise control.
Other methods include pole changing, where motors are wound for multiple pole configurations allowing discrete speed steps, and rotor resistance control for wound rotor motors, though this method reduces efficiency. Voltage control provides limited speed reduction but causes significant losses and is rarely used.
Efficiency and Power Factor
Modern three-phase induction motors achieve remarkable efficiency, with premium efficiency models reaching 95% or higher. Losses occur primarily in the stator and rotor windings as heat, in the iron core due to hysteresis and eddy currents, through mechanical friction in bearings, and from windage as the rotor spins.
Power factor, the ratio of real power to apparent power, typically ranges from 0.8 to 0.9 at full load but drops significantly at light loads. Poor power factor increases current draw for a given power output, requiring larger cables and transformers. Capacitor banks are often installed to improve power factor in facilities with many motors.
Modern Developments
Recent decades have brought significant advancements to induction motor technology. High-efficiency designs minimize losses through improved materials, optimized geometries, and reduced air gaps. Premium efficiency motors, though more expensive initially, often pay for themselves through energy savings within a few years.
The integration of motors with variable frequency drives has revolutionized industrial processes, enabling precise speed and torque control while reducing energy consumption. Smart motors incorporate sensors and communication capabilities, feeding data to maintenance systems for predictive maintenance strategies that prevent unexpected failures.
Advances in materials science have produced better magnetic steels, improved insulation systems, and more efficient cooling methods. Some manufacturers now offer motors with die-cast copper rotors instead of aluminum, improving efficiency by 1-2% compared to conventional designs.
Conclusion
The three-phase induction motor represents a pinnacle of electrical engineering elegance—a device that converts electrical energy to mechanical work with remarkable efficiency, reliability, and simplicity. From small fractional horsepower units to massive motors delivering thousands of horsepower, these machines power modern civilization. As industries push toward greater efficiency and smarter manufacturing, the fundamental technology pioneered by Tesla continues to evolve, ensuring that the induction motor will remain the workhorse of industry for generations to come. Its combination of robust construction, low maintenance requirements, and adaptability to modern control systems makes it irreplaceable in the contemporary industrial landscape.
1. A 3-phase, 50 Hz, 6-pole induction motor runs at 960 rpm. Neglecting stator copper loss, core loss, and rotational losses, what is the approximate percentage efficiency of the motor?
A. 92%
B. 94%
C. 96%
D. 98%
Answer: C. 96%
Explanation: The synchronous speed is 1000 rpm. Slip is (1000 minus 960) divided by 1000 equals 0.04. Efficiency is approximately equal to (1 minus slip), hence efficiency is about 96 percent. Important terms are slip, synchronous speed, and efficiency relation.
2. In a 3-phase induction motor, the ratio of rotor copper loss to the air-gap power is equal to:
A. s
B. 1 minus s
C. s divided by 1 minus s
D. 1 divided by s
Answer: A. s
Explanation: Rotor copper loss is equal to slip multiplied by air-gap power. Hence the ratio of rotor copper loss to air-gap power is equal to slip. Important terms are rotor copper loss, air-gap power, and slip.
3. A 3-phase induction motor is operating at a slip s. The ratio of gross mechanical power output to the air-gap power is:
A. s
B. 1 minus s
C. s divided by 1 minus s
D. 1 divided by s
Answer: B. 1 minus s
Explanation: Gross mechanical power is equal to air-gap power multiplied by (1 minus slip). Therefore, the ratio is (1 minus s). Important terms are gross mechanical power, air-gap power, and slip.
4. For a 3-phase induction motor, the maximum torque developed is:
A. Directly proportional to rotor resistance
B. Inversely proportional to rotor resistance
C. Independent of rotor resistance
D. Directly proportional to the square root of rotor resistance
Answer: C. Independent of rotor resistance
Explanation: Maximum torque does not depend on rotor resistance, although the slip at which it occurs depends on rotor resistance. Important terms are maximum torque, rotor resistance, and slip at maximum torque.
5. A 3-phase, 440 V, 50 Hz induction motor has a 4% slip. The frequency of the rotor EMF will be:
A. 0.2 Hz
B. 2.0 Hz
C. 50 Hz
D. 200 Hz
Answer: B. 2.0 Hz
Explanation: Rotor frequency is equal to slip multiplied by supply frequency. Hence rotor frequency equals 0.04 multiplied by 50 which is 2 Hz. Important terms are rotor frequency, slip, and supply frequency.
6. The slip at which maximum torque occurs in a 3-phase induction motor (neglecting stator impedance) is given by:
A. R2 divided by X2
B. X2 divided by R2
C. R2 squared divided by X2
D. X2 squared divided by R2
Answer: A. R2 divided by X2
Explanation: Maximum torque occurs when rotor resistance is equal to slip multiplied by rotor reactance, giving slip equals R2 divided by X2. Important terms are maximum torque condition, rotor resistance, and rotor reactance.
7. In a squirrel cage induction motor, the rotor slots are often skewed to:
A. Reduce magnetic hum and prevent cogging
B. Increase starting torque
C. Decrease rotor resistance
D. Improve the cooling of the motor
Answer: A. Reduce magnetic hum and prevent cogging
Explanation: Skewing of rotor slots helps in reducing magnetic locking between stator and rotor teeth, thereby preventing cogging and reducing noise. Important terms are skewing, cogging, and magnetic hum.
8. If a 3-phase induction motor is fed by a 5th harmonic voltage component, the slip of the motor with respect to this 5th harmonic (where s is the fundamental slip) is:
A. 5 minus s divided by 5
B. 1 plus 4 divided by 5 multiplied by s
C. 5s
D. 1 minus s divided by 5
Answer: A. 5 minus s divided by 5
Explanation: For nth harmonic, slip is given by (n minus fundamental slip) divided by n. For 5th harmonic, slip equals (5 minus s) divided by 5. Important terms are harmonic slip, fundamental slip, and harmonic order.
9. During the blocked rotor test of a 3-phase induction motor, the power input represents:
A. Mostly core losses
B. Only windage and friction losses
C. Stator and rotor copper losses
D. Total motor losses at full load speed
Answer: C. Stator and rotor copper losses
Explanation: During blocked rotor test, voltage is low and frequency effects are minimal, so core and mechanical losses are negligible. Input power mainly represents copper losses. Important terms are blocked rotor test, copper losses, and negligible core losses.
10. A 3-phase, 4-pole induction motor operates from a 50 Hz supply. If the slip is 0.06, the speed of the rotor is:
A. 1500 rpm
B. 1440 rpm
C. 1410 rpm
D. 1350 rpm
Answer: C. 1410 rpm
Explanation: Synchronous speed is 1500 rpm. Rotor speed equals synchronous speed multiplied by (1 minus slip), giving 1500 multiplied by 0.94 equals 1410 rpm. Important terms are synchronous speed, slip, and rotor speed.