A DC shunt motor is a type of direct current (DC) motor in which the field winding is connected in parallel (shunt) with the armature winding. Because the field winding is connected directly across the supply voltage, the field current remains almost constant, resulting in good speed regulation. DC shunt motors are widely used in applications where constant speed operation is required.
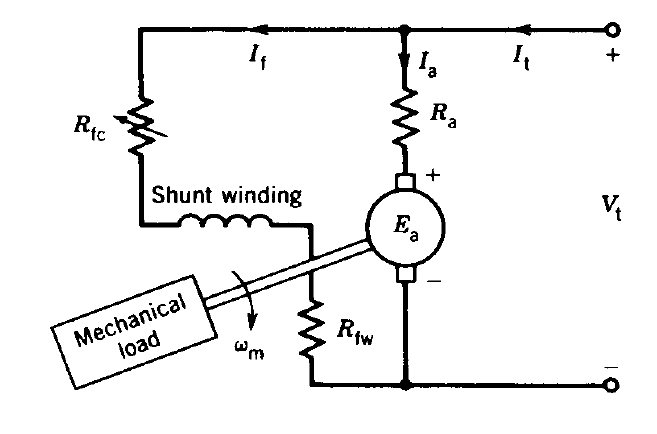
Table of Contents
Construction of DC Shunt Motor
The construction of a DC shunt motor is similar to other DC motors and consists of the following main parts.
Stator (Field System)
The stator contains the shunt field winding, which is connected in parallel with the armature. Since it carries a small current, the winding has many turns of thin wire to produce the required magnetic field.
Rotor (Armature)
The rotor carries the armature winding, where current flows and electromagnetic torque is produced.
Commutator
The commutator converts the alternating current induced in the armature conductors into direct current at the motor terminals.
Brushes
Carbon brushes provide electrical contact between the external circuit and the rotating commutator.
Circuit Diagram
In a DC shunt motor, the field winding is connected in parallel with the armature circuit.
Thus, the total current drawn from the supply is
\[
I = I_a + I_f
\]
where
- \(I\) = line current
- \(I_a\) = armature current
- \(I_f\) = field current
The field current is
\[
I_f = \frac{V}{R_f}
\]
where
- \(V\) = supply voltage
- \(R_f\) = field resistance
Back EMF
When the armature rotates, a back electromotive force (EMF) is induced which opposes the applied voltage.
\[
E_b = V – I_a R_a
\]
where
- \(E_b\) = back EMF
- \(V\) = supply voltage
- \(I_a\) = armature current
- \(R_a\) = armature resistance
Torque Equation
The developed torque in a DC motor is given by
\[
T \propto \phi I_a
\]
In a DC shunt motor, the field flux \((\phi)\) is approximately constant because the field current is constant.
Thus,
\[
T \propto I_a
\]
This means the torque increases linearly with armature current.
Speed of DC Shunt Motor
The speed equation of a DC motor is
\[
N \propto \frac{E_b}{\phi}
\]
Since the flux \((\phi)\) remains nearly constant in a shunt motor, the speed remains
almost constant even when load changes.
Thus, DC shunt motors have good speed regulation.
Characteristics of DC Shunt Motor
Torque–Current Characteristic
Torque increases linearly with armature current.
Speed–Current Characteristic
Speed decreases slightly as armature current increases.
Speed–Torque Characteristic
Speed remains nearly constant over a wide range of torque.
Advantages of DC Shunt Motor
- Good speed regulation
- Nearly constant speed operation
- Simple and reliable
- Suitable for moderate starting torque
Disadvantages
- Lower starting torque compared to DC series motor
- Requires separate field winding
- Not suitable for heavy starting loads
Applications
DC shunt motors are widely used in applications requiring constant speed, such as:
- Lathes and machine tools
- Conveyors
- Fans and blowers
- Centrifugal pumps
- Printing presses